Исполнительный и специальный Сервопривод
Исполнительный сервоприод работает под управлением контроллера движения, имеет ограниченный набор функций и настроек, прост в работе. В следствии этого исполнительный сервоприод является более экономичным. Рассмотрим исполнительные cервоприводы на примере синхронных cервоприводов Mecapion.
Исполнительный сервопривод Mecapion
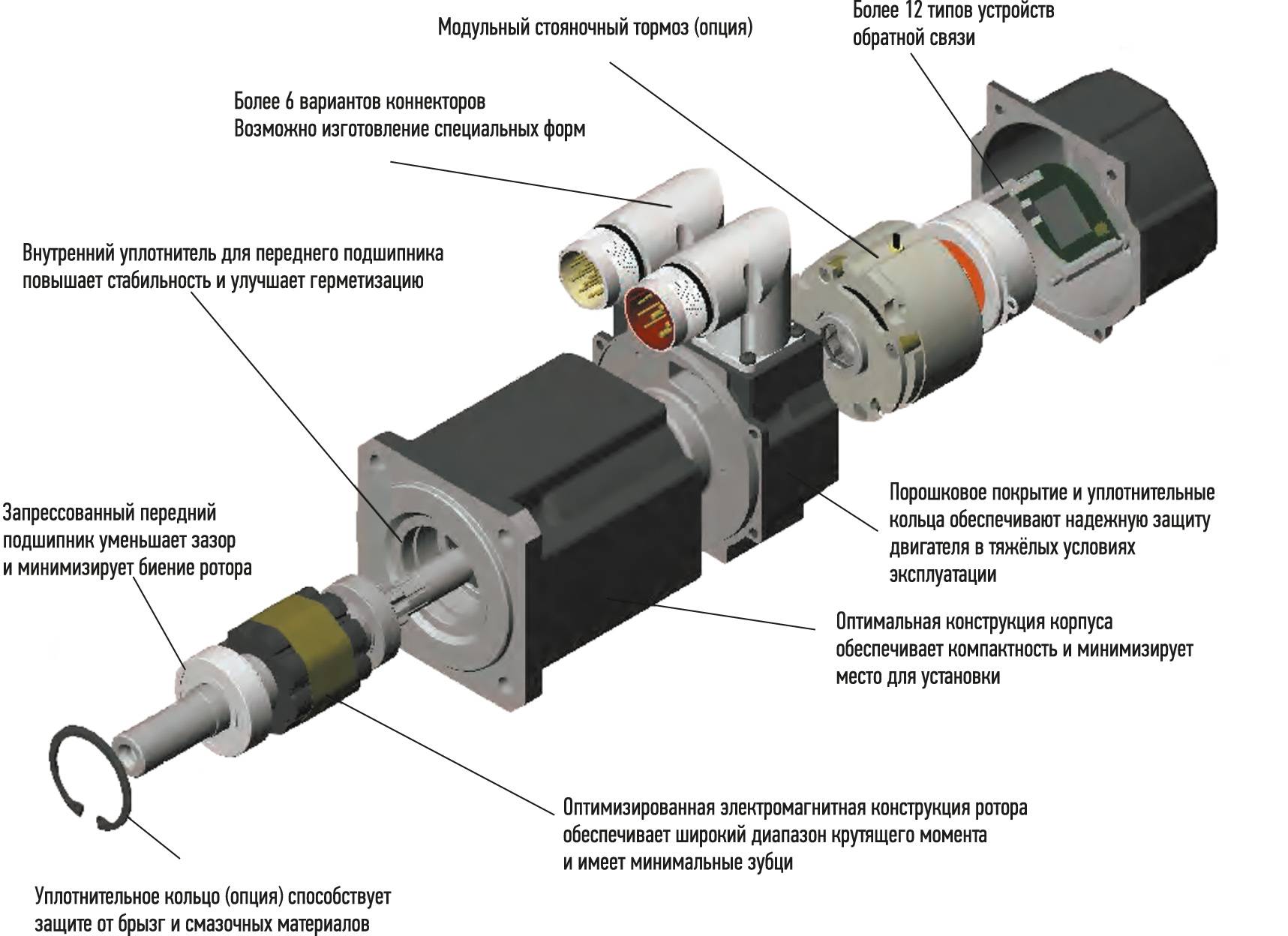
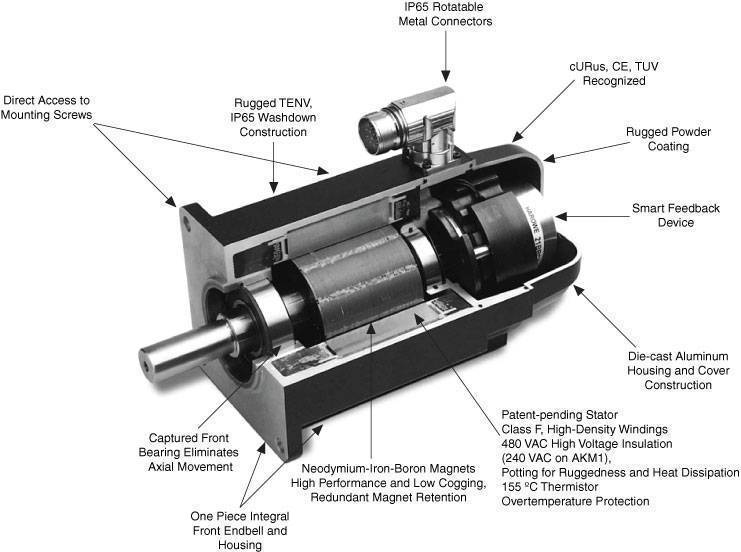
Синхронные Сервоприводы Mecapion (ex. Metronix) – базовый продукт для системных решений в области промышленной автоматизации давно знакомый российским потребителям.
Основные особенности cервоприводов Metronix
- диапазон мощностей от 0,03 до 11 кВт
- встроенный комплект рекуператора, позволяющий возвращать энергию в сеть, и встроенный ключ сброса энергии при динамических торможениях
- тестовый режим работы преобразователей частоты
- функции устранения вибраций при вращении двигателя и его останове позволяют исключить работу преобразователя частоты в колебательном режиме как при наладке, так и в эксплуатации
- возможность использования как относительных, так и абсолютных инкрементальных датчиков положения
- выбор режима работы системы управления – управление по скорости или по моменту
- наличие расширенного пакета программного обеспечения позволяет легко и быстро менять функции преобразователя частоты и решать на его базе различные технические задачи (в т. ч. по реализации управления приводами подачи)
- наличие в линейке продукции Metronix двигателей с полым валом позволяет исключить из кинематической схемы промежуточное устройство – соединительную муфту
- программируемые выходы позволяют строить системы с высокой степенью защиты от различных нештатных ситуаций и с максимальной информативностью для оператора
Mecapion VS
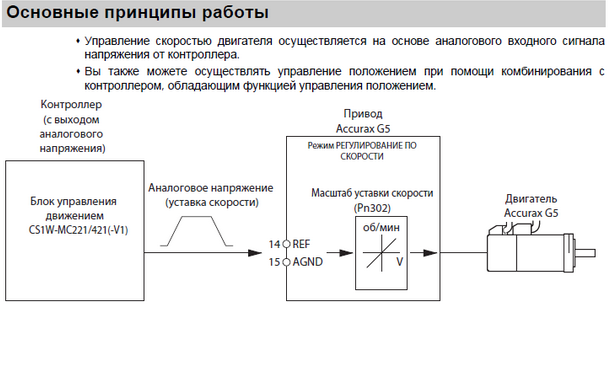
Серия VS – стандартная общепромышленная, реализует управление по скорости, моменту (±10 В) и положению (step/dir).
Преобразователи частоты серии VS могут работать в следующих режимах:
- управление позицией при использовании внешнего контроллера, задающего последовательность импульсов.
- управление скоростью по аналоговому входу или дискретным входам.
- управление моментом по аналоговому входу в режиме ограничения максимального момента.
- управление скоростью/позицией.
- управление скоростью/моментом.
- управление позицией/моментом.
Mecapion VP
Специальная серия VP предназначена для выполнения специальных задач:
- линейно-координатное позиционирование с возможностью выбора до 64 позиций шестью дискретными входами (VP1), типичная сфера применения – обеспечение линейного перемещения в системах с трансмиссией на ШВП
угловое позиционирование с возможностью выбора до 32 позиций пятью дискретными входами (VP2), типичная сфера применения – поворотные столы, роторные конвейерные линии, устройства автоматической смены инструмента и т. п.
- позиционирование с использованием подачи дотягивания (VP3), типичная сфера применения – упаковочные машины, всевозможные виды подающих устройств с позиционированием как по сигналу с энкодера на валу двигателя, так и по по метке внешнего дискретного датчика
- программируемое пошаговое позиционирование с возможностью выбора до 8 программ тремя дискретными входами (VP5), каждая программа может иметь до 100 шагов (позиций), сохраняемых в памяти преобразователя частоты
- для связи преобразователя частоты VS и персонального (промышленного) компьютера используется встроенный СОМ-порт, при необходимости через конвертор RS232/RS485 преобразователи частоты можно объединить в сеть
Сервопривод Mecapion
Сервопривод – что это такое
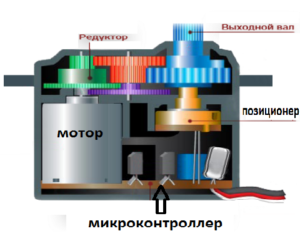
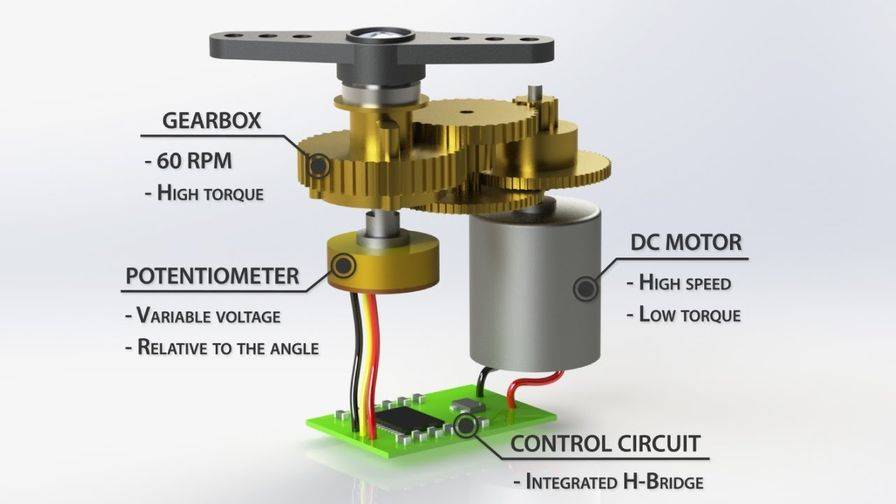
Под этим понятием обычно подразумевают оснащенный электромотором механизм, который можно разместить под нужным углом и зафиксировать в одном положении. Но данное определение недостаточно емкое, поэтому его можно и нужно дополнить.
Это также силовой агрегат, управление которым реализовано через отрицательную обратную связь. Именно последняя дает возможность чутко контролировать заданные параметры перемещения. И у него просто должен быть датчик – позиции, нагрузки, скорости – и блок контроля, который поддерживает необходимые условия в автоматическом режиме.
В числе самых распространенных сегодня находятся модели, сохраняющие установленный угол и/или интенсивность выполнения технологической операции.
Процесс рекуперации
Рекуперация происходит при изменении направления (знака) момента нагрузки по отношению к вращающему моменту серводвигателя. Если энергия рекуперации невелика, она накапливается на конденсаторах звена постоянного тока, повышая напряжение на них.
Если разница абсолютных значений моментов нагрузки и серводвигателя составляет значительную величину, напряжение на конденсаторах шины постоянного тока может превысить пороговый уровень. В этом случае энергия рекуперации сбрасывается в тормозной резистор.
Другие полезные материалы:
Выбор оптимального типоразмера электродвигателя Сервопривод или шаговый двигатель? Принципы программирования ПЛК
Принцип работы цифровой конструкции
Слуга линейного движения: что это такое? Фактически указанное устройство представляет собой регулятор с обратной связью. Сегодня модели пользуются большим спросом. Они идеально подходят для различных систем отопления. Содержащиеся в них преобразователи часто используются на три контакта. Ящики статора устанавливаются разной мощности. Двигатели могут использоваться только синхронного типа.
В противном случае блоки питания не выдержат предельного напряжения. В этой ситуации редукторы используются как единое целое. Шестерни используются для передачи крутящего момента от двигателя. Да, сегодня на рынке много модификаций с выходным валом. В этом случае скорость оборотов можно регулировать с помощью контроллера.
Несколько лет назад все сервоприводы были аналоговыми. Теперь появился и цифровой дизайн. В чем разница между их работами? Перейдем к информации официального характера.
Последний этап развития — появление цифрового устройства. Эти агрегаты также имеют значительные преимущества перед коллекторными двигателями. Однако есть и недостатки.
Внешне аналоговые и цифровые устройства ничем не отличаются. Различия фиксируются только на карточках устройств. Вместо микросхемы на цифровом блоке можно увидеть микропроцессор, анализирующий сигнал с приемника. Он проверяет двигатель.





совершенно неправильно говорить, что аналоговые и цифровые модификации принципиально отличаются в работе. У них могут быть одинаковые двигатели, механизмы и потенциометры
Итак, становится ясно, слуга, что это?
Сравнение с шаговым двигателем
Другой вариант точного позиционирования ведомых элементов без датчика обратной связи — использование шагового двигателя. В этом случае схема управления отсчитывает необходимое количество импульсов (шагов) от исходного положения (эта характеристика обусловлена характерным шумом шагового двигателя в 3,5-дюймовых приводах и CD / DVD при повторной попытке его чтения). В этом случае точное позиционирование обеспечивается параметрическими системами с отрицательной обратной связью, которые образуются взаимодействием соответствующих полюсов статора и ротора шагового двигателя.Опорный сигнал для соответствующей параметрической системы генерируется системой управления шаговым двигателем система, которая активирует соответствующий полюс статора.
Поскольку датчик обычно управляет ведомым элементом, электрический сервопривод имеет следующие преимущества перед шаговым двигателем
- не предъявляет особых требований к электродвигателю и коробке передач — они могут быть практически любого желаемого типа и мощности (а шаговые двигатели, как правило, бывают маломощными и тихоходными);
- гарантирует максимальную точность, автоматически компенсируя: механические (люфт в приводе) или электронные неисправности в приводе;
- постепенный износ привода, при этом шаговый двигатель требует для этого периодической регулировки;
- тепловое расширение накопителя (во время работы или сезонное), что стало одной из причин перехода на сервопривод для позиционирования головок в жестких дисках;
- обеспечить немедленное обнаружение неисправности (выхода из строя) привода (механического или электронного);
- максимально возможная скорость движения элемента (у шагового двигателя самая низкая максимальная скорость по сравнению с другими типами электродвигателей);
- затраты энергии пропорциональны сопротивлению элемента (шаговый двигатель постоянно запитан номинальным напряжением с запасом на возможную перегрузку);
Недостатки по сравнению с шаговым двигателем
- необходимость в дополнительном элементе — датчике;
- блок управления и логика его работы более сложны (требуется обработка результатов датчиков и выбор управляющего воздействия, а в центре контроллера шагового двигателя находится только счетчик);
- проблема фиксации: обычно она решается постоянным торможением подвижного элемента или вала электродвигателя (что приводит к потерям энергии) или использованием червячных / винтовых передач (конструктивное усложнение) (в шаговом двигателе каждый шаг задается сам мотор).
- сервоприводы обычно дороже, чем шаговые.
Однако возможно использование сервопривода на базе шагового двигателя или в дополнение к нему, в некоторой степени объединив их преимущества и исключив конкуренцию друг с другом (сервопривод выполняет грубое позиционирование в зоне покрытия соответствующая система шагового двигателя, причем последний выполняет окончательное позиционирование с относительно большим крутящим моментом и фиксирует положение).
В сервоприводе нет проблем с ремонтом, в отличие от шагового. Высокоточное позиционирование и поддержание в заданном положении обеспечивается работой электрической машины в клапанном режиме, суть которого сводится к ее работе в качестве источника энергии. В зависимости от несовпадения положения (и других координат электропривода) формируется силовая задача. При этом несомненным плюсом сервопривода является энергоэффективность — ток подается только в том объеме, который необходим для удержания рабочего органа в определенном положении. В отличие от пошагового режима, когда применяется максимальное значение тока, определяющее угловую характеристику станка. Угловая характеристика станка аналогична небольшим отклонениям механической пружины, которая пытается «подтянуть» рабочий орган в нужную точку. В шаговом приводе чем больше смещение положения, тем больше сила при постоянном токе.
Управление сервоприводом
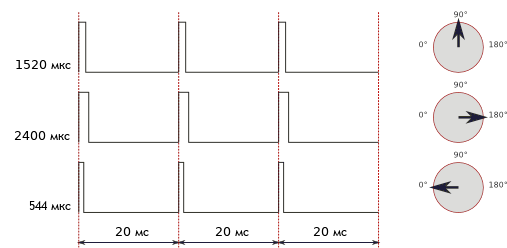
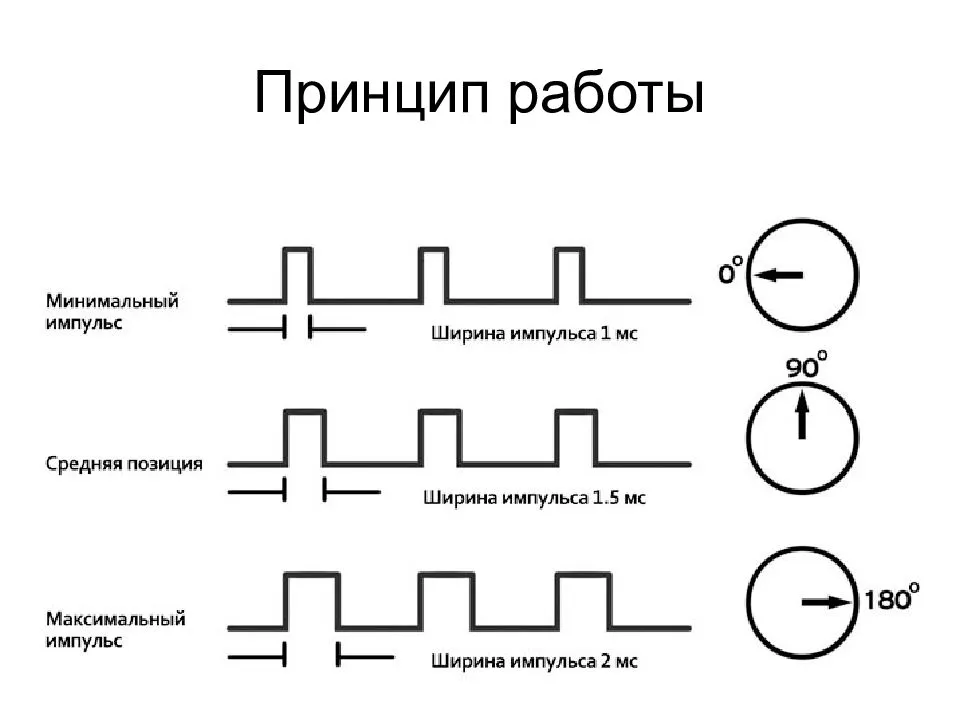
 Решающим фактором в управлении сервоприводами является управляющий сигнал, который представляет собой постоянную частоту и импульсы различной длительности. Длина импульса — один из важнейших параметров, определяющих положение сервопривода. Эту длину можно установить вручную в программе с помощью метода выбора угла или с помощью библиотечных команд. Для каждой марки устройства длина может быть разной.
Решающим фактором в управлении сервоприводами является управляющий сигнал, который представляет собой постоянную частоту и импульсы различной длительности. Длина импульса — один из важнейших параметров, определяющих положение сервопривода. Эту длину можно установить вручную в программе с помощью метода выбора угла или с помощью библиотечных команд. Для каждой марки устройства длина может быть разной.
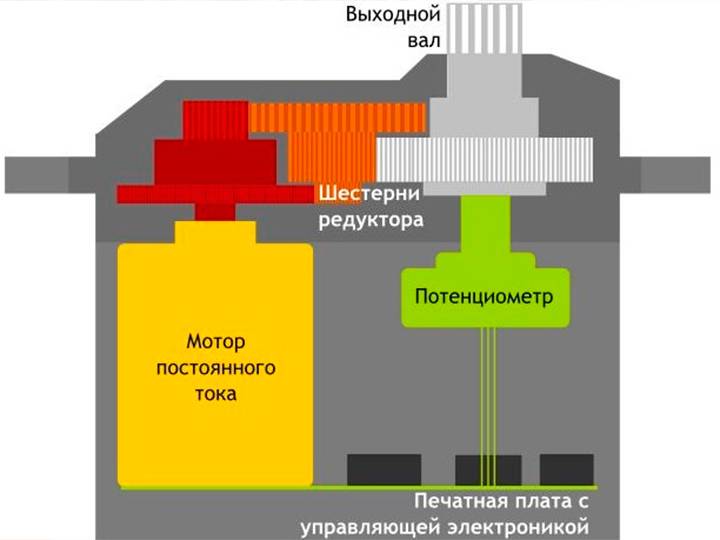
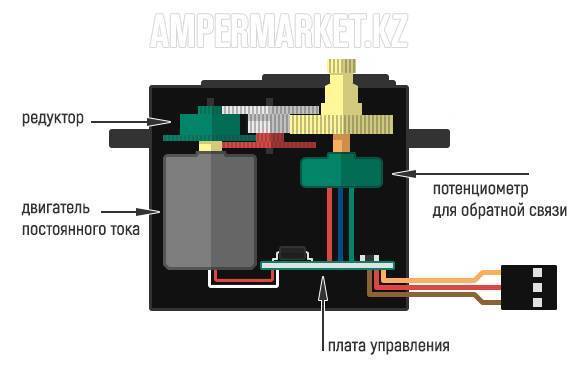
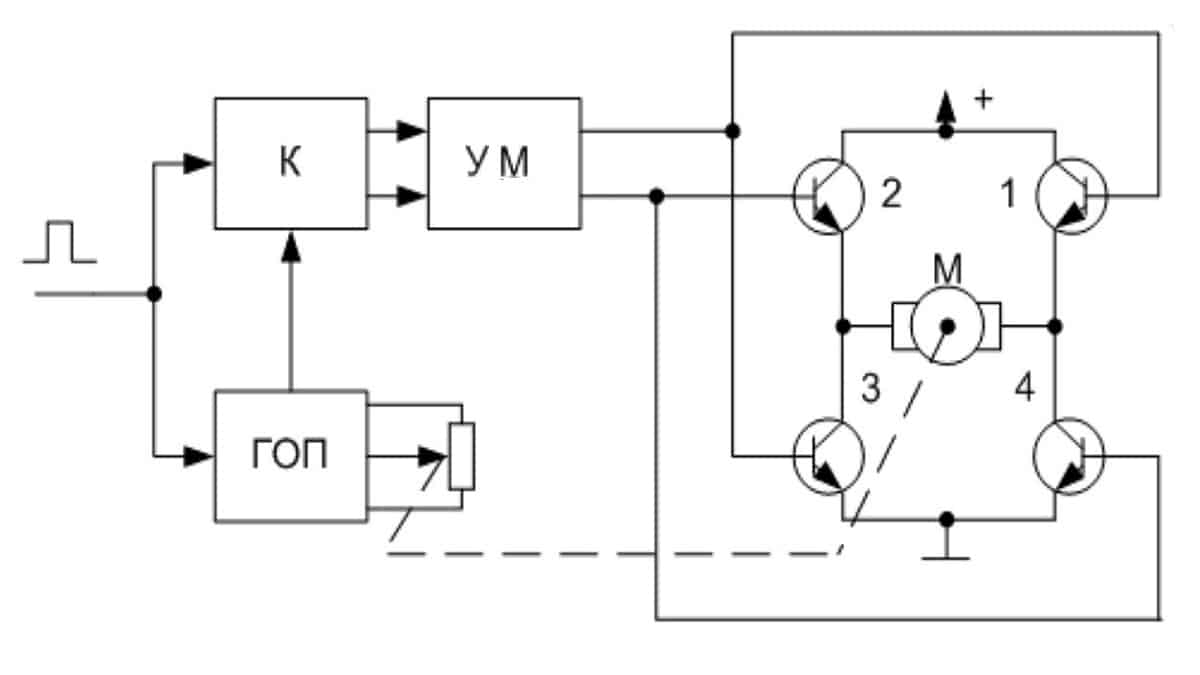
При поступлении сигнала в схему управления генератор издает свой импульс, длительность которого определяется с помощью потенциометра. В другой части схемы сравнивается длительность подаваемого сигнала и сигнала от генератора. Если эти сигналы имеют разную длительность, включается электродвигатель, направление вращения которого определяется тем, какой из импульсов короче. Если длительность импульса такая же, двигатель останавливается.
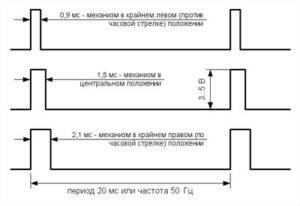
Стандартная частота, с которой доставляются импульсы, составляет 50 Гц, то есть 1 импульс каждые 20 миллисекунд. При этих значениях продолжительность составляет 1520 микросекунд, а сервопривод находится в центральном положении. Изменение длительности импульса приводит к вращению сервопривода — при увеличении длительности вращение выполняется по часовой стрелке, при уменьшении — против часовой стрелки. Есть ограничения по длительности: в Arduino в библиотеке Servo для 0 ° значение импульса установлено на 544 мкс (нижний предел), для 180 ° — 2400 мкс (верхний предел).
(Изображение использовано сайтом amperka.ru)
важно учитывать, что настройки на конкретном устройстве могут незначительно отличаться от общепринятых значений. Для некоторых устройств среднее положение и длительность импульса могут составлять всего 760 мкс
Все принятые значения также могут незначительно отличаться из-за ошибки, которая может быть допущена при изготовлении устройства.
Метод управления приводом часто ошибочно называют ШИМ / ШИМ, но это не совсем правильно. Контроль напрямую зависит от длительности импульсов, частота их появления не так уж и важна. Правильная работа будет обеспечена как на 40 Гц, так и на 60 Гц, только резкое уменьшение или увеличение частоты будет способствовать. В случае резкого падения сервопривод начнет работать рывками; если частота завышена выше 100 Гц, устройство может перегреться. Поэтому правильнее называть его PDM.
Внутренний интерфейс можно разделить на аналоговые и цифровые сервоприводы. Внешних отличий нет — все отличия только во внутренней электронике. Аналоговый сервопривод внутри содержит специальную микросхему, цифровую — микропроцессор, который принимает и анализирует импульсы.
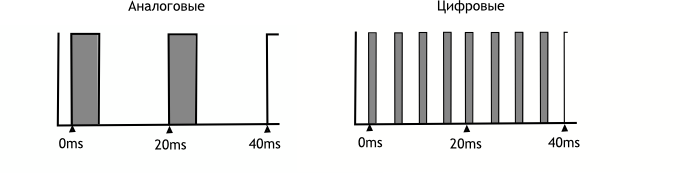
Получив сигнал, аналоговый сервопривод решает, менять положение или нет, и, при необходимости, посылает на двигатель сигнал с частотой 50 Гц.В течение времени реакции (20 мс) могут возникать внешние воздействия, которые будут измените положение сервопривода и устройство не успеет среагировать. Цифровой сервопривод использует процессор, который подает и обрабатывает сигналы с более высокой частотой — от 200 Гц, чтобы он мог быстрее реагировать на внешние воздействия, быстрее развивать требуемую скорость и крутящий момент. В результате цифровой сервопривод лучше удерживает заданное положение. Однако цифровой сервопривод требует большей мощности для работы, что увеличивает стоимость. Сложность их изготовления также сильно влияет на цену. Единственным недостатком цифровых сервоприводов является высокая стоимость, технически они намного лучше аналоговых устройств.

![Сервоприводы: устройство, принцип работы и основные виды [амперка / вики]](https://world-wells.ru/wp-content/uploads/2/b/b/2bbb1bc218dc7818fe8f315ecb6fcad2.jpeg)


Демонстрационнаяпрограмма приведена ниже, показано, как использовать сервомоторов смикроконтроллером AVR. Работы программы очень проста, она начинается синициализации таймера и PWM.В начале фиксируеться сервопривод на 0 градусов, азатем перемещается на 90 градусов и подождатв некоторое время перемещается на135 градусов, и наконец, на 180градусов. Этот процесс повторяется до тех пор, пока привод подключен к питанию.
Параметры для корректного функционирования программы.
- Предохранитель LOW = 0xFF и предохранитель HIGH = 0xC9
- Частота = 16 МГц.
- Серводвигатель Futaba S3003 .
- MCU — это однокристальный микроконтроллер AtMega32 или ATmega16.
Библиотека Servo
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространённая задача, что для её упрощения существует стандартная библиотека Servo.
Сервопривод постоянного вращения можно управлять с помощью библиотек Servo или Servo2. Отличие заключается в том, что функция Servo.write(angle) задаёт не угол, а скорость вращения привода.
Библиотека Servo позволяет осуществлять программное управление сервоприводами. Управление осуществляется следующими функциями:
- attach() — присоединяет объект к конкретному выводу платы. Возможны два варианта синтаксиса для этой функции: servo.attach(pin) и servo.attach(pin, min, max). При этом pin — номер пина, к которому присоединяют сервопривод, min и max — длины импульсов в микросекундах, отвечающих за углы поворота 0° и 180°. По умолчанию выставляются равными 544 мкс и 2400 мкс соответственно. Возвращаемого значения нет.
- write() — отдаёт команду сервоприводу принять некоторое значение параметра. Синтаксис: servo.write(angle), где angle — угол, на который должен повернуться сервопривод
- writeMicroseconds() — отдаёт команду послать на сервопривод имульс определённой длины, является низкоуровневым аналогом предыдущей команды. Синтаксис следующий: servo.writeMicroseconds(uS), где uS — длина импульса в микросекундах. Возвращаемого значения нет.
- read() — читает текущее значение угла, в котором находится сервопривод. Синтаксис: servo.read(), возвращается целое значение от 0 до 180
- attached() — проверка, была ли присоединён объект к конкретному пину. Синтаксис следующий: servo.attached(), возвращается логическая истина, если объект была присоединён к какому-либо пину, или ложь в обратном случае
- detach() — производит действие, обратное действию attach(), то есть отсоединяет объект от пина, к которому был приписан. Синтаксис: servo.detach()
В библиотеке Servo для Arduino по умолчанию выставлены следующие значения длин импульса: 544 мкс — для 0° и 2400 мкс — для 180°.
Пример подключения двух сервоприводов.
Библиотека Servo не совместима с библиотекой VirtualWire для работы с приёмником и передатчиком на 433 МГц, так как они используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2. Все методы библиотеки Servo2 совпадают с методами Servo.
При работе с сервоприводами на 360 градусов функции работают по другому.
| Функция Arduino | Сервопривод 180° | Сервопривод 360° |
|---|---|---|
| Servo.write(0) | Крайне левое положение | Полный ход в одном направлении |
| Servo.write(90) | Среднее положение | Остановка сервопривода |
| Servo.write(180) | Крайне правое положение | Полный ход в обратном направлении |
Виды и характеристики
Серводвигатели выпускаются в самых разных вариантах, позволяющих использовать их во многих областях. Основные конструкции разделяются на коллекторные и бесколлекторные, предназначенные для работы от постоянного и переменного тока.
Кроме того, каждый сервомотор может быть синхронным и асинхронным. Синхронные устройства обладают способностью задавать высокоточную скорость вращения, а также углы поворотов и ускорение. Эти приводы очень быстро набирают номинальную скорость вращения. Сервоприводы в асинхронном исполнении управляются за счет изменения параметров питающего тока, когда его частота меняется с помощью инвертора. Они с высокой точностью выдерживают заданную скорость даже при самых низких оборотах.

В зависимости от принципиальной схемы и конструкции, сервоприводы могут быть электромеханическими и электрогидромеханическими. Первый вариант, включающий редуктор и двигатель, отличается низким быстродействием. Во втором случае действие происходит очень быстро за счет движения поршня в цилиндре.
Каждый сервопривод характеризуется определенными параметрами:
- Крутящий момент или усилие, создаваемое на валу. Считается наиболее важным показателем работы сервопривода. Для каждой величины напряжения существует собственный крутящий момент, отражаемый в паспорте изделия.
- Скорость поворота. Данный параметр представляет собой определенный период времени, который требуется, чтобы изменить позицию выходного вала на 600. Эта характеристика также зависит от конкретного значения напряжения.
- Максимальный угол поворота, на который может развернуться выходной вал. Чаще всего эта величина составляет 180 или 3600.
- Все сервоприводы разделяются на цифровые и аналоговые. В зависимости от этого и осуществляется управление сервоприводом.
- Питание серводвигателей. В большинстве моделей используется напряжение от 4,8 до 7,2В. Питание и управление осуществляется с помощью трех проводников.
- Возможность модернизации в сервопривод постоянного вращения.
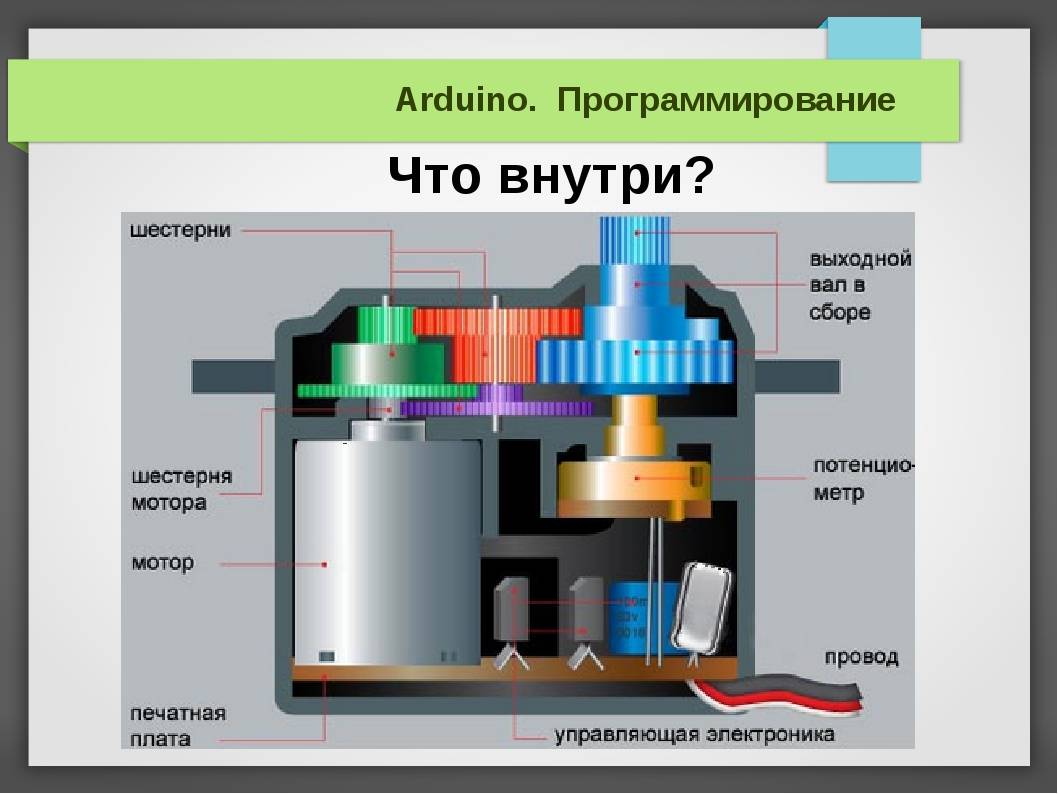
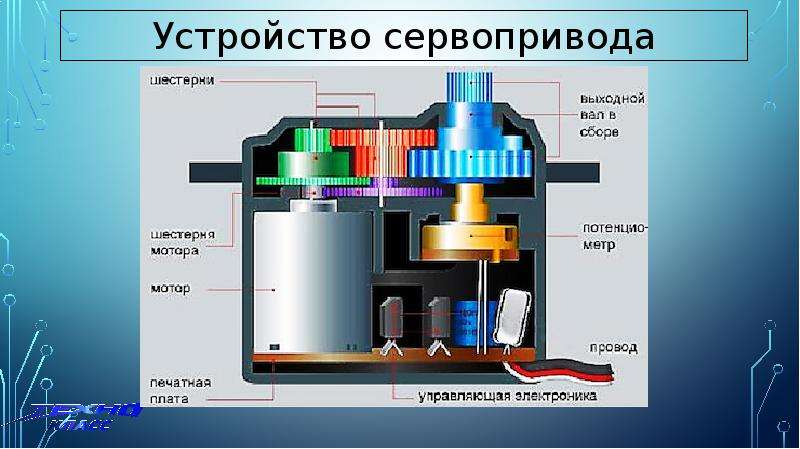
- Материалы для редуктора могут использоваться самые разные. Шестерни изготавливаются из металла, карбона, пластика или комбинированных составов. Каждый из них обладает своими преимуществами и недостатками. Например, пластиковые детали плохо выдерживают ударные нагрузки, но устойчивы к износу в процессе длительной эксплуатации. Металлические шестерни, наоборот, быстро изнашиваются, зато они обладают высокой устойчивостью к динамическим нагрузкам.
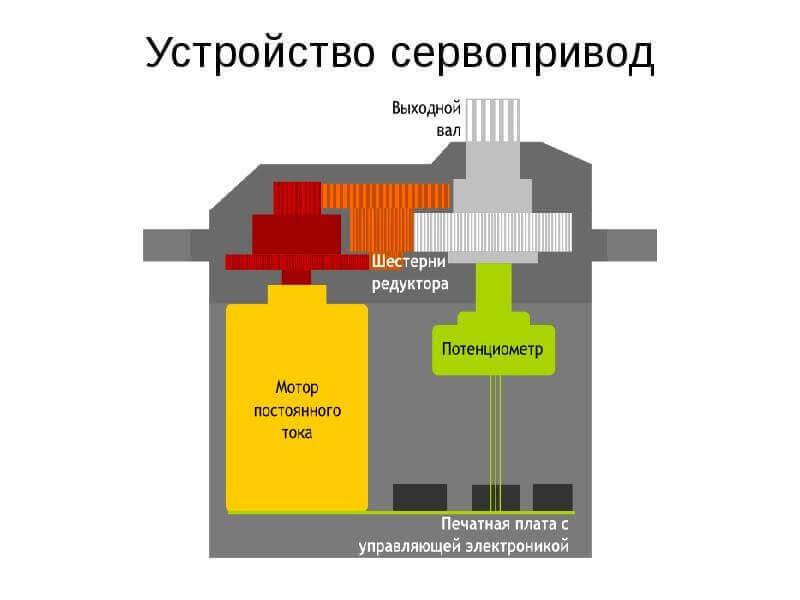
Схема и типы сервоприводов
Принцип работы сервопривода основан на обратной связи с одним или несколькими системными сигналами. Выходной показатель подается на вход, где сравнивается его значение с задающим действием и выполняются необходимые действия – например, выключается двигатель. Самым простым вариантов реализации является переменный резистор, который управляется валом – при изменении параметров резистора меняются параметры питающего двигатель тока.
В реальных сервоприводов механизм управления гораздо сложнее и использует встроенные микросхемы-контроллеры. В зависимости от типа используемого механизма обратной связи выделяют аналоговые и цифровые сервоприводы. Первые используют что-то, похожее на потенциометр, вторые – контроллеры.
 Вся схема управления серво находится внутри корпуса, управляющие сигналы и питание подаются, как правило, идут по трем проводам: земля, напряжение питания и управляющий сигнал.
Вся схема управления серво находится внутри корпуса, управляющие сигналы и питание подаются, как правило, идут по трем проводам: земля, напряжение питания и управляющий сигнал.
Сервопривод непрерывного вращения 360, 180 и 270 градусов
Выделяют два основных вида серводвигателей – с непрерывным вращением и с фиксированным углом (чаще всего, 180 или 270 градусов). Отличие серво ограниченного вращения заключается в механических элементах конструкции, которые могут блокировать движение вала вне заданных параметрами углов. Достигнув угла 180, вал окажет воздействие на ограничитель, а тот отдаст команду на выключение мотора. У серводвигателей непрерывного вращения таких ограничителей нет.
Материалы шестерней сервопривода
У большинства сервоприводов связующим звеном между валом и внешними элементами является шестеренка, поэтому очень важно, из какого материала она сделана. Наиболее доступных вариантов два: металлические или пластмассовые шестерни
В более дорогих моделях можно найти элементы из карбона и даже титана.


Пластмассовые варианты, естественно, дешевле, проще в производстве и часто используются в недорогих моделях серво. Для учебных проектов, когда сервопривод делает несколько движений, это не страшно. Но в серьезных проектах использование пластмассы невозможно, в виду очень быстрого снашивания таких шестеренок под нагрузкой.

 Металлические шестеренки надежнее, но это, безусловно, сказывается как на цене, так и на весе модели. Экономные производители могут сделать часть деталей пластмассовыми, а часть металлическими, это тожно нужно иметь в виду. Ну и, естественно, что в самых дешевых моделях даже наличие металлической шестеренки не является гарантией качества.
Металлические шестеренки надежнее, но это, безусловно, сказывается как на цене, так и на весе модели. Экономные производители могут сделать часть деталей пластмассовыми, а часть металлическими, это тожно нужно иметь в виду. Ну и, естественно, что в самых дешевых моделях даже наличие металлической шестеренки не является гарантией качества.
Титановые или карбоновые шестерни – самый предпочтительный вариант, если вы не ограничены бюджетом. Легкие и надежные, такие сервоприводы активно используются для создания моделей автомобилей, дронов и самолетов.
Преимущества серводвигателей
Широкое использование сервоприводов связано с тем, что они обладают стабильной работой, высокой устойчивостью к помехам, малыми габаритами и широким диапазоном контроля скорости. Важными особенностями сервоприводов являются способность увеличивать мощность и обеспечение обратной информационной связи. И этого следует, что при прямом направлении контур является передатчиком энергии, а при обратном – передатчиком информации, которая используется для улучшения точности управления.
Отличия серво и обычного двигателя
Включая или выключая обычный электрический двигатель, мы можем сформировать вращательное движение и заставить двигаться колеса или другие предметы, прикрепленные к валу. Движение это будет непрерывным, но для того, чтобы понять, на какой угол повернулся вал или сколько оборотов он сделал, потребуется устанавливать дополнительные внешние элементы: энкодеры. Сервопривод уже содержит все необходимое для получения информации о текущих параметрах вращения и мжет самостоятельно выключаться, когда вал повернется на необходимый угол.
Отличия серво и шагового мотора
Важным отличием серводвигателя от шагового двигателя является возможность работать с большими ускорениями и при переменной нагрузке. Также серводвигатели обладают более высокой мощностью. Шаговые двигатели не обладают обратной связью, поэтому может наблюдаться эффект потери шагов, в серводвигателях потери шагов исключены – все нарушения будут зафиксированы и исправлены. При всех этих явных преимуществах серводвигатели являются более дорогостоящими приборами, чем шаговые двигатели, обладают более сложной системой подключения и управления и требуют более квалифицированного обслуживания
Важно отметить, что шаговые двигатели и сервоприводами не являются прямыми конкурентами – каждое из этих устройств занимает свою определенную сферу применения